पिछले विषय [जीजी] में, इलेक्ट्रिक मोटर्स का वर्गीकरण [जीजी] उद्धरण;, मैंने ब्रश डीसी मोटर (बीडीसी) के विभिन्न प्रकारों की व्याख्या की, जो कि निम्नलिखित आरेख में है:

आज, मैं ब्रशलेस डीसी मोटर (बीएलडीसी) और एसी इंडक्शन मोटर के बारे में बताऊंगा।
आप समीक्षा और अच्छे अनुसरण के लिए निम्नलिखित संबंधित विषयों की समीक्षा कर सकते हैं।
इलेक्ट्रिकल मोटर्स बेसिक कंपोनेंट्स
2- ब्रशलेस डीसी मोटर्स
|
ब्रशलेस डीसी मोटर्स |

ब्रश डीसी मोटर्स में, मैकेनिकल कम्यूटेटर और संबंधित ब्रश कई कारणों से समस्याग्रस्त हैं:
ब्रश पहनना होता है, और यह कम दबाव वाले वातावरण में नाटकीय रूप से बढ़ जाता है।
यदि वातावरण में विस्फोटक सामग्री है तो ब्रश से निकलने वाली चिंगारी विस्फोट का कारण बन सकती है।
ब्रश से निकलने वाला आरएफ शोर आस-पास के टीवी सेट, या इलेक्ट्रॉनिक उपकरणों आदि में हस्तक्षेप कर सकता है।
ब्रशलेस डायरेक्ट करंट (BLDC) मोटर्स तेजी से लोकप्रियता हासिल करने वाले मोटर प्रकारों में से एक हैं। BLDC मोटर्स का उपयोग उपकरणों, मोटर वाहन, एयरोस्पेस, उपभोक्ता, चिकित्सा, औद्योगिक स्वचालन उपकरण और इंस्ट्रुमेंटेशन जैसे उद्योगों में किया जाता है।
जैसा कि नाम से ही स्पष्ट है, BLDC मोटर्स कम्यूटेशन के लिए ब्रश का उपयोग नहीं करती हैं; इसके बजाय, उन्हें इलेक्ट्रॉनिक रूप से कम्यूट किया जाता है।
ब्रश डीसी मोटर्स और इंडक्शन मोटर्स पर बीएलडीसी मोटर्स के कई फायदे हैं, इनमें से कुछ हैं:
बेहतर गति बनाम टॉर्क विशेषताएँ।
उच्च गतिशील प्रतिक्रिया।
उच्च दक्षता।
लंबे परिचालन जीवन।
नीरव संचालन।
उच्च गति रेंज।
इसके अलावा, मोटर के आकार में दिए गए टॉर्क का अनुपात अधिक होता है, जिससे यह उन अनुप्रयोगों में उपयोगी हो जाता है जहां स्थान और वजन महत्वपूर्ण कारक होते हैं।
निर्माण
BLDC मोटर्स एक प्रकार की सिंक्रोनस मोटर हैं। इसका मतलब है कि स्टेटर द्वारा उत्पन्न चुंबकीय क्षेत्र और रोटर द्वारा उत्पन्न चुंबकीय क्षेत्र एक ही आवृत्ति पर घूमता है।
BLDC मोटर्स सिंगल-फेज, 2-फेज और 3-फेज कॉन्फ़िगरेशन में आती हैं। इसके प्रकार के अनुरूप, स्टेटर में वाइंडिंग की संख्या समान होती है। इनमें से, 3-फेज मोटर सबसे लोकप्रिय और व्यापक रूप से उपयोग की जाने वाली मोटरें हैं।
1- स्टेटर
|
बीएलडीसी मोटर का स्टेटर |

बीएलडीसी मोटर के स्टेटर में स्टैक्ड स्टील लैमिनेशन होते हैं, जो स्लॉट्स में रखे जाते हैं जो आंतरिक परिधि के साथ अक्षीय रूप से कट जाते हैं।
अधिकांश बीएलडीसी मोटर्स में स्टार फैशन में तीन स्टेटर वाइंडिंग जुड़े होते हैं। इनमें से प्रत्येक वाइंडिंग का निर्माण कई कॉइल के साथ किया जाता है, जो एक वाइंडिंग बनाने के लिए आपस में जुड़े होते हैं। एक या एक से अधिक कॉइल स्लॉट्स में रखे जाते हैं और वे एक वाइंडिंग बनाने के लिए आपस में जुड़े होते हैं। इनमें से प्रत्येक वाइंडिंग को समान संख्या में ध्रुव बनाने के लिए स्टेटर परिधि पर वितरित किया जाता है।
नियंत्रण बिजली आपूर्ति क्षमता के आधार पर, स्टेटर की सही वोल्टेज रेटिंग वाली मोटर को चुना जा सकता है। अड़तालीस वोल्ट या उससे कम वोल्टेज-रेटेड मोटर्स का उपयोग मोटर वाहन, रोबोटिक्स, छोटे हाथ की गतिविधियों आदि में किया जाता है। 100 वोल्ट या उच्च रेटिंग वाले मोटर्स का उपयोग उपकरणों, स्वचालन और औद्योगिक अनुप्रयोगों में किया जाता है।
2- रोटर
|
बीएलडीसी मोटर का रोटर |

रोटर एक स्थायी चुंबक से बना है और वैकल्पिक उत्तर (एन) और दक्षिण (एस) ध्रुवों के साथ दो से आठ ध्रुव जोड़े से भिन्न हो सकता है।
|
BLDC रोटर चुंबक स्थिति |
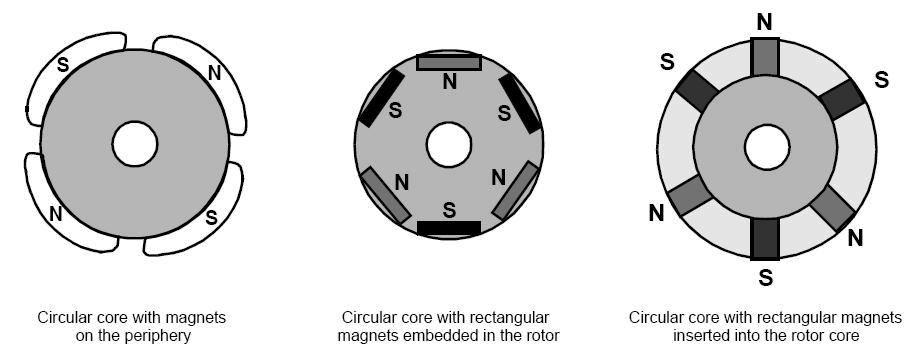
रोटर में आवश्यक चुंबकीय क्षेत्र घनत्व के आधार पर, रोटर बनाने के लिए उचित चुंबकीय सामग्री का चयन किया जाता है। फेराइट मैग्नेट पारंपरिक रूप से स्थायी चुंबक बनाने के लिए उपयोग किया जाता है।
3- हॉल सेंसर
|
बीएलडीसी हॉल सेंसर |
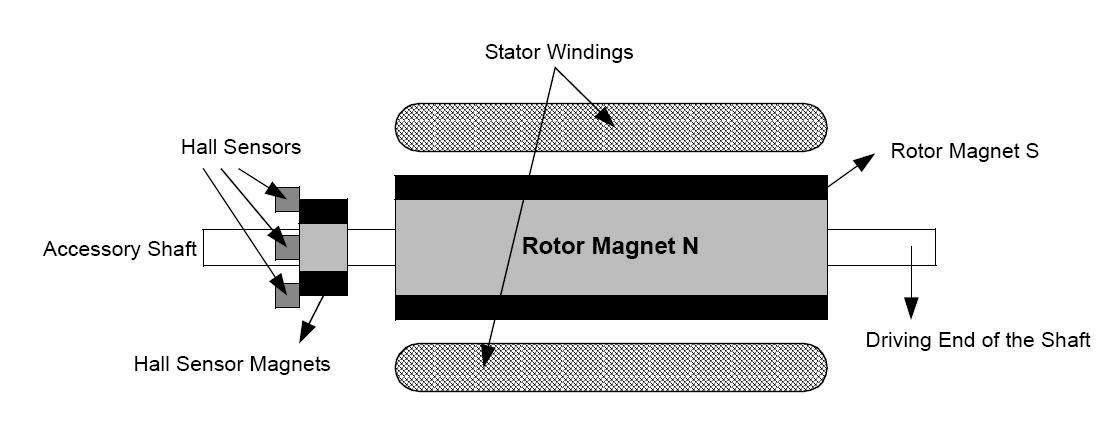
ब्रश डीसी मोटर के विपरीत, बीएलडीसी मोटर का कम्यूटेशन इलेक्ट्रॉनिक रूप से नियंत्रित होता है। BLDC मोटर को घुमाने के लिए, स्टेटर वाइंडिंग को एक क्रम में सक्रिय किया जाना चाहिए। यह समझने के लिए रोटर की स्थिति जानना महत्वपूर्ण है कि कौन सी वाइंडिंग सक्रिय अनुक्रम के बाद सक्रिय होगी। स्टेटर में एम्बेडेड हॉल इफेक्ट सेंसर का उपयोग करके रोटर की स्थिति को महसूस किया जाता है।
अधिकांश बीएलडीसी मोटर्स में मोटर के गैर-ड्राइविंग छोर पर स्टेटर में तीन हॉल सेंसर लगे होते हैं।
जब भी रोटर चुंबकीय ध्रुव हॉल सेंसर के पास से गुजरते हैं, तो वे एक उच्च या निम्न संकेत देते हैं, यह दर्शाता है कि एन या एस ध्रुव सेंसर के पास से गुजर रहा है। इन तीन हॉल सेंसर संकेतों के संयोजन के आधार पर, कम्यूटेशन का सटीक क्रम निर्धारित किया जा सकता है।
हॉल सेंसर की भौतिक स्थिति के आधार पर, आउटपुट के दो संस्करण हैं। हॉल सेंसर एक दूसरे से 60° या 120° फेज़ शिफ्ट में हो सकते हैं। इसके आधार पर, मोटर निर्माता कम्यूटेशन अनुक्रम को परिभाषित करता है, जिसका मोटर को नियंत्रित करते समय पालन किया जाना चाहिए।
नोट: हॉल सेंसर को बिजली की आपूर्ति की आवश्यकता होती है। वोल्टेज 4 वोल्ट से 24 वोल्ट तक हो सकता है। आवश्यक धारा 5 से 15 कण्ठमाला तक हो सकती है।
संचालन का सिद्धांत
प्रत्येक कम्यूटेशन अनुक्रम में सकारात्मक शक्ति (वर्तमान घुमावदार में प्रवेश करती है) के लिए सक्रिय घुमावों में से एक है, दूसरा घुमावदार नकारात्मक है (वर्तमान घुमावदार से बाहर निकलता है) और तीसरा एक गैर-ऊर्जावान स्थिति में है।
स्टेटर कॉइल द्वारा उत्पन्न चुंबकीय क्षेत्र और रोटर के स्थायी चुम्बकों के बीच परस्पर क्रिया के कारण टॉर्क का उत्पादन होता है।
मोटर को चालू रखने के लिए, वाइंडिंग द्वारा उत्पन्न चुंबकीय क्षेत्र को स्थिति में बदलाव करना चाहिए, क्योंकि रोटर स्टेटर क्षेत्र के साथ पकड़ने के लिए चलता है। जिसे "सिक्स-स्टेप कम्यूटेशन" के रूप में जाना जाता है, वाइंडिंग को सक्रिय करने के क्रम को परिभाषित करता है।
छह-चरणीय कम्यूटेशन में, एक बार में तीन ब्रशलेस डीसी मोटर वाइंडिंग में से केवल दो का उपयोग किया जाता है। चरण ६० विद्युत डिग्री के बराबर हैं, इसलिए छह चरण पूर्ण, ३६०-डिग्री घुमाव बनाते हैं। एक पूर्ण 360-डिग्री लूप वर्तमान को नियंत्रित कर सकता है क्योंकि केवल एक वर्तमान पथ है। सिक्स-स्टेप कम्यूटेशन आमतौर पर उच्च गति और कम्यूटेशन फ़्रीक्वेंसी की आवश्यकता वाले अनुप्रयोगों में उपयोगी होता है। सिक्स-स्टेप ब्रशलेस डीसी मोटर में आमतौर पर साइन-वेव कम्यूटेड मोटर की तुलना में कम टॉर्क दक्षता होती है।
विशिष्ट बीएलडीसी मोटर अनुप्रयोग
हम बीएलडीसी मोटर नियंत्रण के प्रकार को तीन प्रमुख प्रकारों में वर्गीकृत कर सकते हैं:
लगातार भार।
भिन्न भार।
पोजिशनिंग एप्लिकेशन।
1- लगातार भार वाले अनुप्रयोग:
ये ऐसे अनुप्रयोग हैं जहां गति की सटीकता को एक निर्धारित गति पर रखने की तुलना में एक चर गति अधिक महत्वपूर्ण है। इसके अलावा, त्वरण और मंदी की दर गतिशील रूप से नहीं बदल रही है। इस प्रकार के अनुप्रयोगों में, लोड सीधे मोटर शाफ्ट से जुड़ा होता है।
उदाहरण के लिए, पंखे, पंप और ब्लोअर इस प्रकार के अनुप्रयोगों के अंतर्गत आते हैं। ये एप्लिकेशन कम लागत वाले नियंत्रकों की मांग करते हैं, जो ज्यादातर ओपन-लूप में काम करते हैं।
2- भिन्न भार वाले अनुप्रयोग:
ये ऐसे अनुप्रयोग हैं जहां मोटर पर भार गति सीमा के अनुसार बदलता रहता है। ये एप्लिकेशन उच्च गति नियंत्रण सटीकता और अच्छी गतिशील प्रतिक्रियाओं की मांग कर सकते हैं।
उदाहरण के लिए,
घरेलू उपकरण: वाशर, ड्रायर और कम्प्रेसर।
ऑटोमोटिव, फ्यूल पंप कंट्रोल, इलेक्ट्रॉनिक स्टीयरिंग कंट्रोल, इंजन कंट्रोल और इलेक्ट्रिक व्हीकल कंट्रोल में।
एयरोस्पेस में, सेंट्रीफ्यूज, पंप, रोबोटिक आर्म कंट्रोल, जायरोस्कोप कंट्रोल आदि जैसे कई एप्लिकेशन हैं।
ये एप्लिकेशन स्पीड फीडबैक डिवाइस का उपयोग कर सकते हैं और सेमी-क्लोज्ड लूप या टोटल क्लोज्ड लूप में चल सकते हैं।
3- पोजिशनिंग एप्लीकेशन:
अधिकांश औद्योगिक और स्वचालन प्रकार के अनुप्रयोग इस श्रेणी के अंतर्गत आते हैं। इस श्रेणी के अनुप्रयोगों में किसी प्रकार का विद्युत संचरण होता है, जो यांत्रिक गियर या टाइमर बेल्ट, या एक साधारण बेल्ट-संचालित प्रणाली हो सकता है। इन अनुप्रयोगों में, गति और टोक़ की गतिशील प्रतिक्रिया महत्वपूर्ण हैं। साथ ही, इन अनुप्रयोगों में रोटेशन दिशा का बार-बार उलट होना हो सकता है।
ये सिस्टम ज्यादातर क्लोज्ड-लूप में काम करते हैं।
अंत में, ब्रश डीसी मोटर (बीडीसी) और ब्रशलेस डीसी मोटर (बीएलडीसी) के बीच तुलना नीचे दी गई छवि में दिखाया गया है।

दूसरा: एसी मोटर्स
अल्टरनेटिंग करंट (एसी) मोटर्स एक विद्युत प्रवाह का उपयोग करते हैं, जो नियमित अंतराल पर अपनी दिशा को उलट देता है।
एसी मोटर्स पर डीसी मोटर्स का मुख्य लाभ यह है कि एसी मोटर्स के लिए गति को नियंत्रित करना अधिक कठिन होता है। इसकी भरपाई के लिए, एसी मोटर्स को वेरिएबल फ़्रीक्वेंसी ड्राइव से लैस किया जा सकता है लेकिन बेहतर गति नियंत्रण कम बिजली की गुणवत्ता के साथ आता है।
एसी मोटर्स के प्रकार:

आज आम उपयोग में एसी मोटरों को दो व्यापक श्रेणियों में विभाजित किया जा सकता है:
प्रेरण (अतुल्यकालिक) मोटर्स।
तुल्यकालिक मोटर्स।
रैखिक मोटर्स।
इन दो प्रकार की मोटरों में भिन्नता है कि रोटर क्षेत्र उत्तेजना को निम्नानुसार आपूर्ति की जाती है:
प्रेरण मोटर्स के लिए, कोई बाहरी रूप से लागू रोटर उत्तेजना नहीं है, और घूर्णन स्टेटर चुंबकीय क्षेत्र के कारण वर्तमान को रोटर वाइंडिंग्स में प्रेरित किया जाता है।
तुल्यकालिक मोटर्स के लिए, रोटर वाइंडिंग पर एक क्षेत्र उत्तेजना लागू की जाती है। क्षेत्र उत्तेजना में यह अंतर मोटर विशेषताओं में अंतर की ओर जाता है, जो बदले में प्रत्येक मोटर प्रकार के लिए अलग-अलग सुरक्षा और नियंत्रण आवश्यकताओं की ओर जाता है।
1- इंडक्शन मोटर
इंडक्शन मोटर्स उद्योग में विभिन्न उपकरणों के लिए उपयोग की जाने वाली सबसे आम मोटर हैं।
प्रेरण मोटर: तथाकथित क्योंकि वोल्टेज रोटर में प्रेरित होता है (इस प्रकार ब्रश की कोई आवश्यकता नहीं होती है), लेकिन ऐसा होने के लिए, रोटर की तुलना में घुमाना एक प्रेरित वोल्टेज के अस्तित्व की अनुमति देने के लिए चुंबकीय क्षेत्र की कम गति पर होना चाहिए।
इसलिए इंडक्शन मोटर का वर्णन करने के लिए एक नए शब्द की आवश्यकता है जो स्लिप है।
चूक:
एक ड्राइविंग टॉर्क केवल तभी मौजूद हो सकता है जब शेडिंग रिंग में एक प्रेरित करंट हो। यह रिंग में करंट द्वारा निर्धारित किया जाता है और केवल तभी मौजूद हो सकता है जब रिंग में फ्लक्स भिन्नता हो। इसलिए, छायांकन रिंग और घूर्णन क्षेत्र में गति में अंतर होना चाहिए। यही कारण है कि ऊपर वर्णित सिद्धांत पर चलने वाली इलेक्ट्रिक मोटर को "एसिंक्रोनस मोटर" कहा जाता है।
सिंक्रोनस स्पीड (Ns) और शेडिंग रिंग स्पीड (N) के बीच के अंतर को "स्लिप" (s) कहा जाता है और इसे सिंक्रोनस स्पीड के प्रतिशत के रूप में व्यक्त किया जाता है।
एस=(एनएसआईएन - एनएम) / एनएसआईएन
पर्ची कहाँ है? स्लिप इंडक्शन मशीनों के नियंत्रण और संचालन में सबसे महत्वपूर्ण चरों में से एक है।
s=0: यदि रोटर समकालिक गति से चलता है।
s=1: यदि रोटर स्थिर है।
s is -ve: यदि रोटर समकालिक गति से अधिक गति से चलता है।
s +ve है: यदि रोटर समकालिक गति से कम गति से चलता है।
लाभ:
सरल डिजाइन, बीहड़, कम कीमत, आसान रखरखाव।
बिजली रेटिंग की विस्तृत श्रृंखला: भिन्नात्मक अश्वशक्ति 10 मेगावाट तक।
अनिवार्य रूप से नो-लोड से लेकर फुल लोड तक निरंतर गति से दौड़ें।
इसकी गति शक्ति स्रोत की आवृत्ति पर निर्भर करती है।
लो और मीडियम हॉर्सपावर रेंज में आज सबसे लोकप्रिय मोटर।
निर्माण में बहुत मजबूत।
डीसी मोटर्स को उन क्षेत्रों में बदल दिया है जहां पारंपरिक डीसी मोटर्स का उपयोग नहीं किया जा सकता है जैसे कि मोटर निर्माण के आधार पर दो प्रकार के खनन या विस्फोटक वातावरण; गिलहरी केज या स्लिप रिंग।
नुकसान:
परिवर्तनशील गति नियंत्रण रखना आसान नहीं है।
इष्टतम गति नियंत्रण के लिए एक चर-आवृत्ति पावर-इलेक्ट्रॉनिक ड्राइव की आवश्यकता होती है।
उनमें से ज्यादातर लैगिंग पावर फैक्टर के साथ चलते हैं।
संचालन का सिद्धांत:
स्टेटर आमतौर पर ग्रिड से जुड़ा होता है और इस प्रकार, स्टेटर चुंबकित होता है।
स्टेटर चुंबकीय क्षेत्र रोटर वाइंडिंग को काटता है और रोटर वाइंडिंग में एक प्रेरित वोल्टेज उत्पन्न करता है।
क्योंकि रोटर वाइंडिंग शार्ट-सर्किटेड हैं, गिलहरी केज और घाव-रोटर दोनों के लिए, और रोटर वाइंडिंग में प्रेरित धारा प्रवाहित होती है।
रोटर करंट एक और चुंबकीय क्षेत्र पैदा करता है।
टॉर्क उन दो चुंबकीय क्षेत्रों की परस्पर क्रिया के परिणामस्वरूप उत्पन्न होता है।
निर्माण:
एक प्रेरण मोटर के दो मुख्य भाग होते हैं
1- स्टेटर
|
इंडक्शन मोटर स्टेटर |

यह मोटर का अचल भाग है। कच्चा लोहा या हल्के मिश्र धातु में एक शरीर पतली सिलिकॉन स्टील प्लेटों (लगभग 0.5 मिमी मोटी) की एक अंगूठी रखता है। प्लेटों को ऑक्सीकरण या एक इन्सुलेट वार्निश द्वारा एक दूसरे से अछूता रहता है। चुंबकीय सर्किट का "लेमिनेशन" हिस्टैरिसीस और एड़ी धाराओं द्वारा नुकसान को कम करता है।
प्लेटों में स्टेटर वाइंडिंग के लिए पायदान होते हैं जो घूर्णन क्षेत्र को फिट करने के लिए (3-चरण मोटर के लिए तीन वाइंडिंग) का उत्पादन करेंगे। प्रत्येक वाइंडिंग कई कॉइल से बनी होती है। जिस तरह से कॉइल एक साथ जुड़ते हैं, वह मोटर पर ध्रुवों के जोड़े की संख्या और इसलिए रोटेशन की गति को निर्धारित करता है।
2- रोटर
यह मोटर का मोबाइल हिस्सा है। स्टेटर के चुंबकीय सर्किट की तरह, इसमें एक दूसरे से अछूता स्टैक्ड प्लेट होते हैं और मोटर शाफ्ट के लिए एक सिलेंडर का निर्माण होता है।
इंडक्शन मोटर्स के प्रकार
|
इंडक्शन मोटर्स के प्रकार |

इंडक्शन मोटर्स को रोटर प्रकार के अनुसार निम्नानुसार वर्गीकृत किया गया है:
ए- गिलहरी-पिंजरे रोटर:

|
गिलहरी-पिंजरे रोटर |

इसमें समानांतर स्लॉट में एम्बेडेड मोटी कंडक्टिंग बार होते हैं। इन बारों को शॉर्ट-सर्किटिंग रिंगों का उपयोग करके दोनों सिरों पर शॉर्ट-सर्किट किया जाता है।
बी- घाव रोटर:

|
रोटर को घुमाएं |

इसमें तीन-चरण, डबल-लेयर, वितरित वाइंडिंग है। यह स्टेटर के रूप में कई ध्रुवों के लिए घाव है। तीन चरणों को आंतरिक रूप से तार दिया जाता है और दूसरे छोर एक शाफ्ट पर लगे स्लिप-रिंग से जुड़े होते हैं, जिस पर ब्रश टिका होता है।
उपरोक्त दो प्रकार के इंडक्शन मोटर्स में से प्रत्येक को निम्नानुसार दो मुख्य समूहों में वर्गीकृत किया जा सकता है:
I- सिंगल-फेज इंडक्शन मोटर्स:
इनमें केवल एक स्टेटर वाइंडिंग होती है, जो एकल-चरण बिजली की आपूर्ति के साथ काम करती है, एक गिलहरी पिंजरे का रोटर होता है, और मोटर को चालू करने के लिए एक उपकरण की आवश्यकता होती है। यह अब तक घरेलू उपकरणों में उपयोग की जाने वाली सबसे सामान्य प्रकार की मोटर है, जैसे पंखे, वाशिंग मशीन और कपड़े सुखाने वाले, और 3 से 4 हॉर्स पावर तक के अनुप्रयोगों के लिए।
सिंगल-फेज इंडक्शन मोटर्स एक घाव रोटर के साथ भी आते हैं जिसमें उत्कृष्ट शुरुआती और त्वरित विशेषताएं होती हैं, और वे वैल्यू ऑपरेटर्स, फार्म मोटर एप्लिकेशन, होइस्ट्स, फ्लोर मेंटेनेंस मशीन, एयर कंप्रेशर्स, लॉन्ड्री इक्विपमेंट और माइनिंग इक्विपमेंट के लिए आदर्श होते हैं।
II- तीन चरण प्रेरण मोटर्स:
घूर्णन चुंबकीय क्षेत्र संतुलित तीन-चरण आपूर्ति द्वारा निर्मित होता है। इन मोटरों में उच्च शक्ति क्षमता होती है, इसमें गिलहरी पिंजरे या घाव रोटर हो सकते हैं (हालांकि 90% में गिलहरी पिंजरे रोटर है), और स्वयं शुरू हो रहे हैं। यह अनुमान लगाया गया है कि उद्योग में लगभग 70% मोटर्स इस प्रकार के हैं, उदाहरण के लिए, पंप, कम्प्रेसर, कन्वेयर बेल्ट, भारी-शुल्क वाले विद्युत नेटवर्क और ग्राइंडर में उपयोग किया जाता है। वे 1/3 से सैकड़ों हॉर्सपावर रेटिंग में उपलब्ध हैं।
अब, उपरोक्त प्रकारों के आधार पर इंडक्शन मोटर्स का पहला वर्गीकरण देखें:
1- सिंगल फेज, गिलहरी केज, इंडक्शन मोटर:
इस श्रेणी के कई प्रकार हैं जैसा कि नीचे दी गई छवि में दिखाया गया है।

A- शेडेड-पोल इंडक्शन मोटर्स
निर्माण और संचालन सिद्धांत:
|
छायांकित-पोल इंडक्शन मोटर्स |

छायांकित-पोल मोटर्स में केवल एक मुख्य वाइंडिंग होती है और कोई स्टार्ट वाइंडिंग नहीं होती है। स्टार्टिंग एक डिजाइन का उपयोग कर रहा है जो प्रत्येक मोटर पोल के एक छोटे से हिस्से के चारों ओर एक निरंतर तांबे का लूप बजाता है। यह ध्रुव के उस हिस्से को "छायांकित" करता है, जिससे छायांकित क्षेत्र में चुंबकीय क्षेत्र बिना छायांकित क्षेत्र में क्षेत्र से पिछड़ जाता है। दो क्षेत्रों की प्रतिक्रिया से शाफ्ट घूमता है।
लाभ:
क्योंकि छायांकित-पोल मोटर में स्टार्ट वाइंडिंग, स्टार्टिंग स्विच या कैपेसिटर का अभाव होता है, यह विद्युत रूप से सरल और सस्ती होती है।
गति को केवल अलग-अलग वोल्टेज द्वारा, या एक मल्टी-टैप वाइंडिंग के माध्यम से नियंत्रित किया जा सकता है।
यंत्रवत्, छायांकित-पोल मोटर निर्माण उच्च मात्रा में उत्पादन की अनुमति देता है।
इन्हें आमतौर पर "डिस्पोजेबल" मोटर्स माना जाता है, जिसका अर्थ है कि वे मरम्मत की तुलना में बदलने के लिए बहुत सस्ते हैं।
नुकसान:
इसका लो स्टार्टिंग टॉर्क आमतौर पर रेटेड टॉर्क का 25% से 75% तक होता है।
यह एक हाई स्लिप मोटर है जो सिंक्रोनस स्पीड से 7% से 10% कम चलती है।
आम तौर पर, इस मोटर प्रकार की दक्षता बहुत कम (20% से कम) होती है।
अनुप्रयोग:
कम प्रारंभिक लागत छायांकित-पोल मोटर्स को कम हॉर्सपावर या लाइट ड्यूटी अनुप्रयोगों के लिए उपयुक्त बनाती है। शायद उनका सबसे बड़ा उपयोग घरेलू उपयोग के लिए बहु-गति वाले पंखों में होता है। लेकिन कम टॉर्क, कम दक्षता, और कम मजबूत यांत्रिक विशेषताएं अधिकांश औद्योगिक या व्यावसायिक उपयोग के लिए छायांकित-पोल मोटर्स को अव्यवहारिक बनाती हैं, जहां उच्च चक्र दर या निरंतर शुल्क मानदंड हैं।
अगले विषय में, मैं अन्य प्रकार के सिंगल फेज, स्क्विरेल केज इंडक्शन मोटर की व्याख्या करना जारी रखूंगा। तो, कृपया अनुसरण करते रहें।